Outlier Removal by Plane-Fitting Filters
Bernard Llanos — July 26, 2013 - 1:41pm
In my last post (http://gigl.scs.carleton.ca/node/536), I mentioned I would analyze the plane-fitting filters from a past post (http://gigl.scs.carleton.ca/node/522) with respect to the technique I recently developed for analyzing noise pixel smoothing (see http://gigl.scs.carleton.ca/node/535). The results are provided below:
- "Plane Dist. Version" refers to the plane-fitting filter which uses the source pixel's projection onto a fitted plane to replace the source pixel's colour when building a second filtering mask.
- "Plane Avg. Version" refers to the plane-fitting filter which replaces the average of pixel colours over a filtering mask with the vertical projection of the source pixel onto a plane fitted to its filtering mask.
- "Base filter" is the normal cumulative range geodesic filter, developed by Dr. Mould.
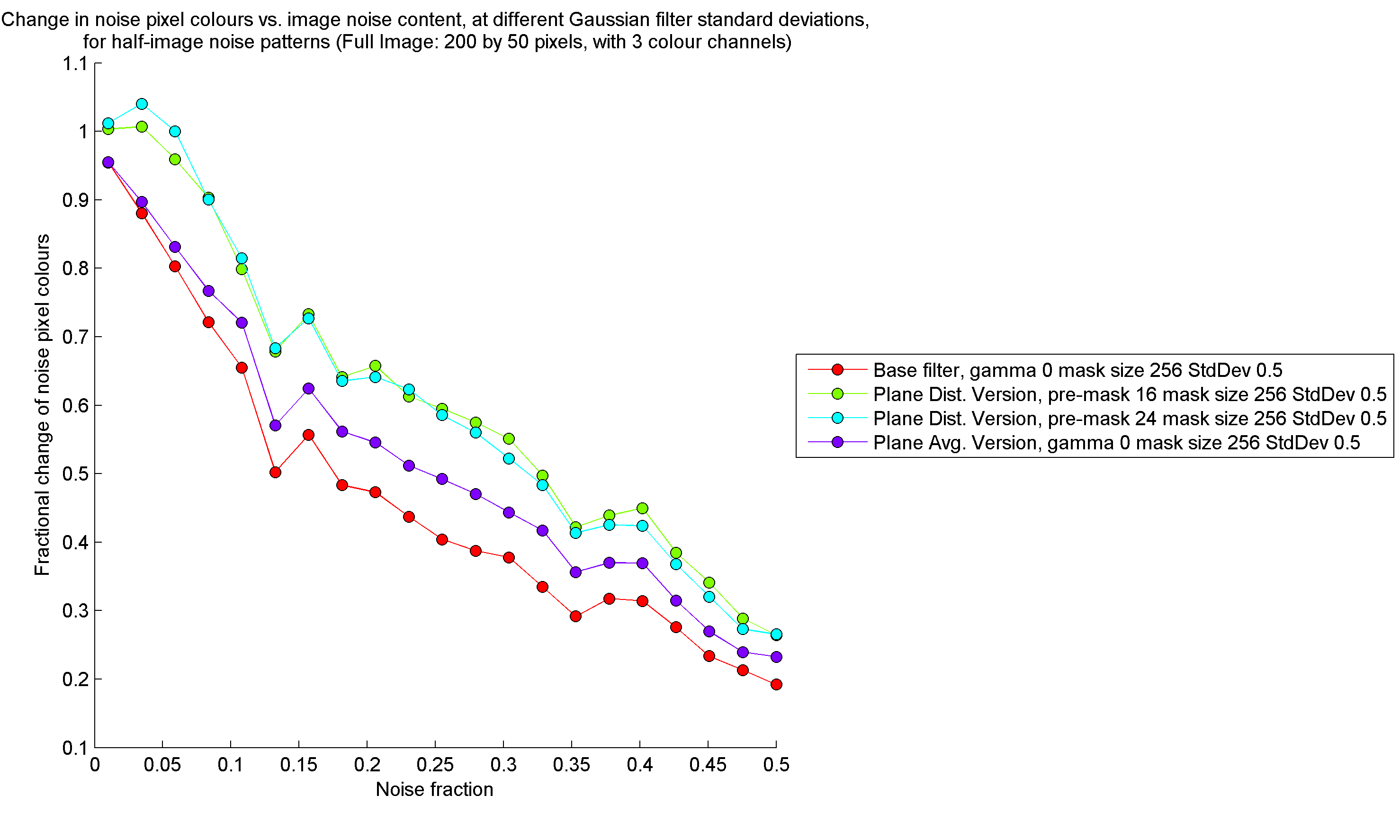
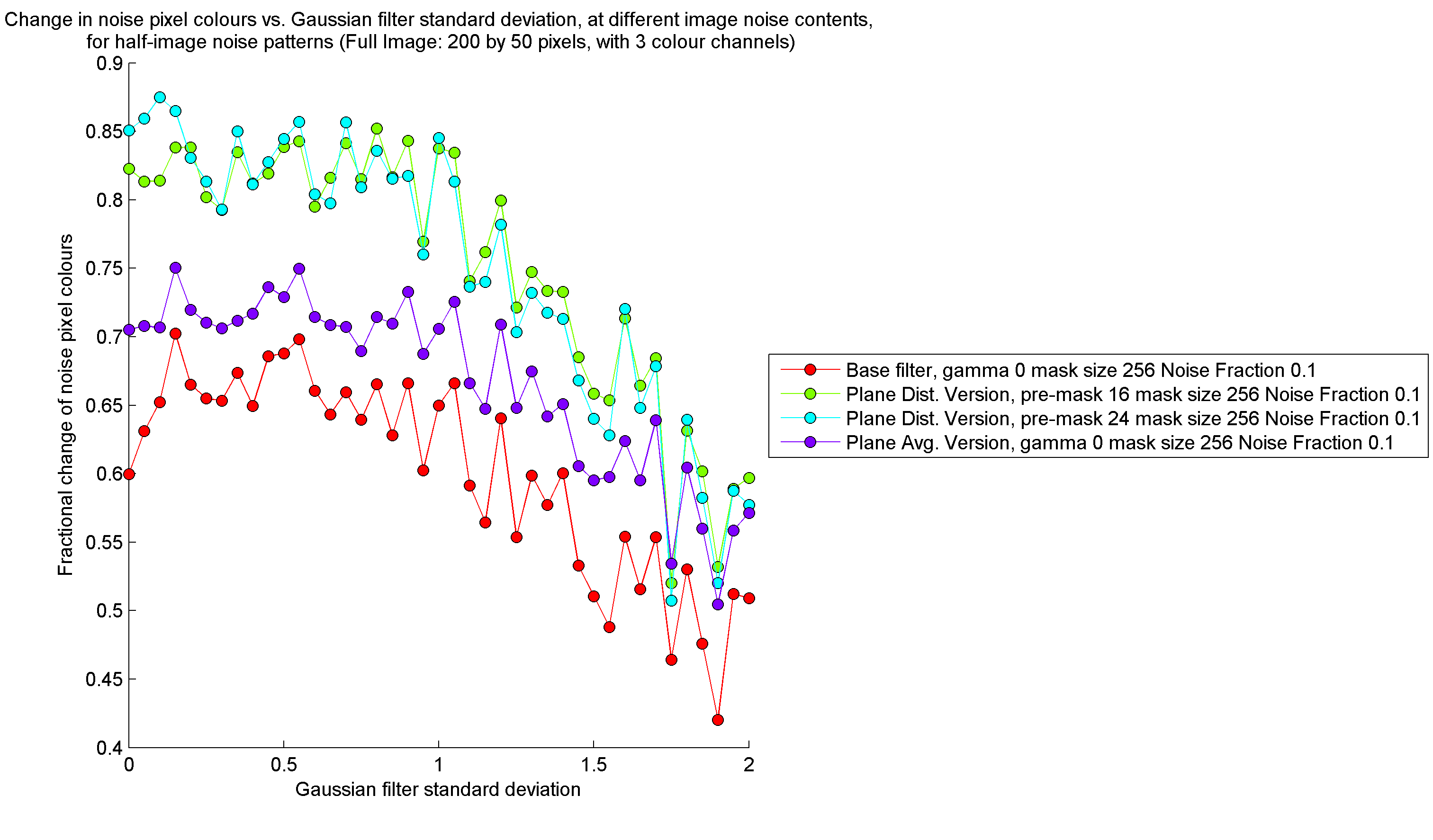
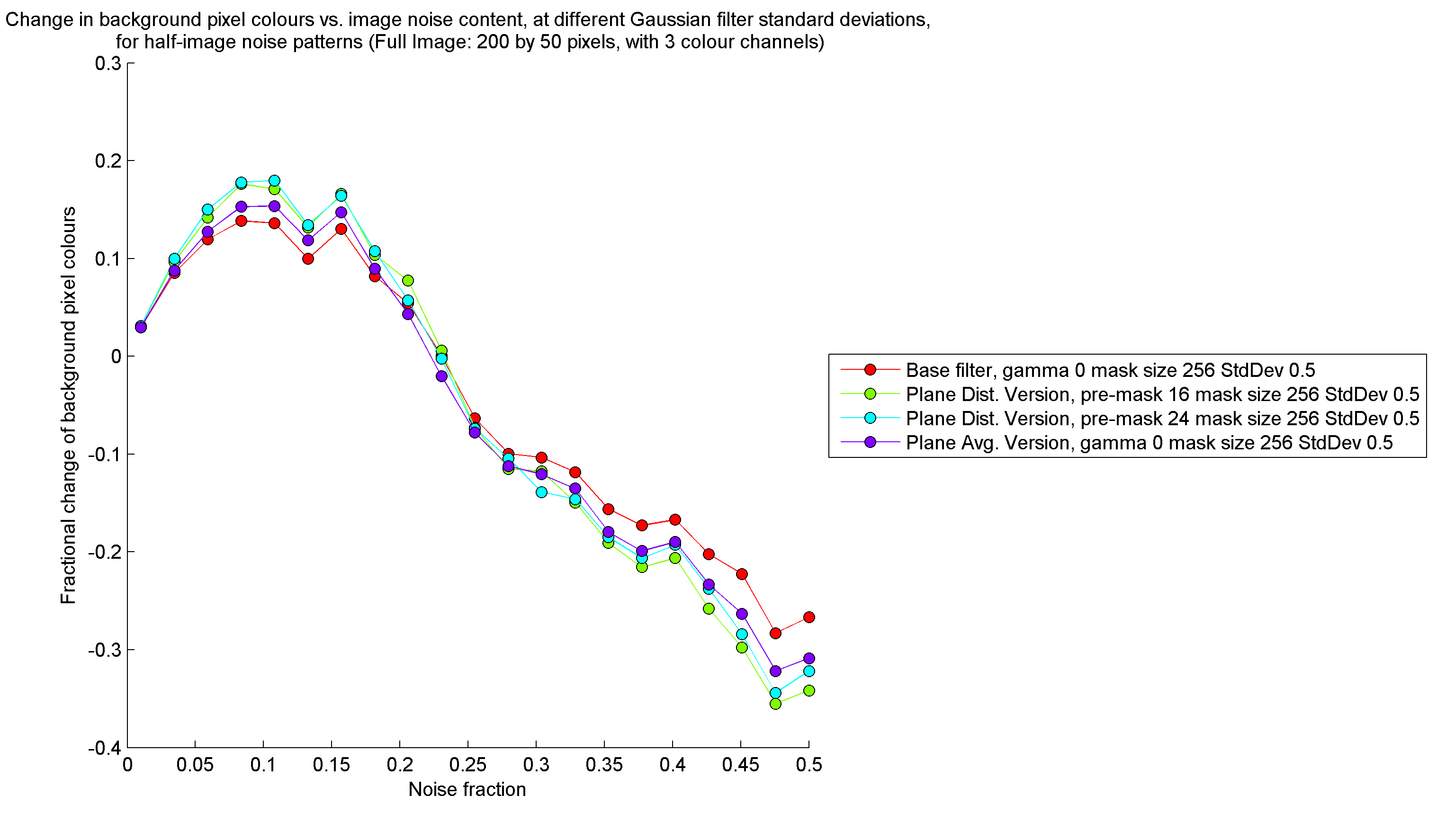
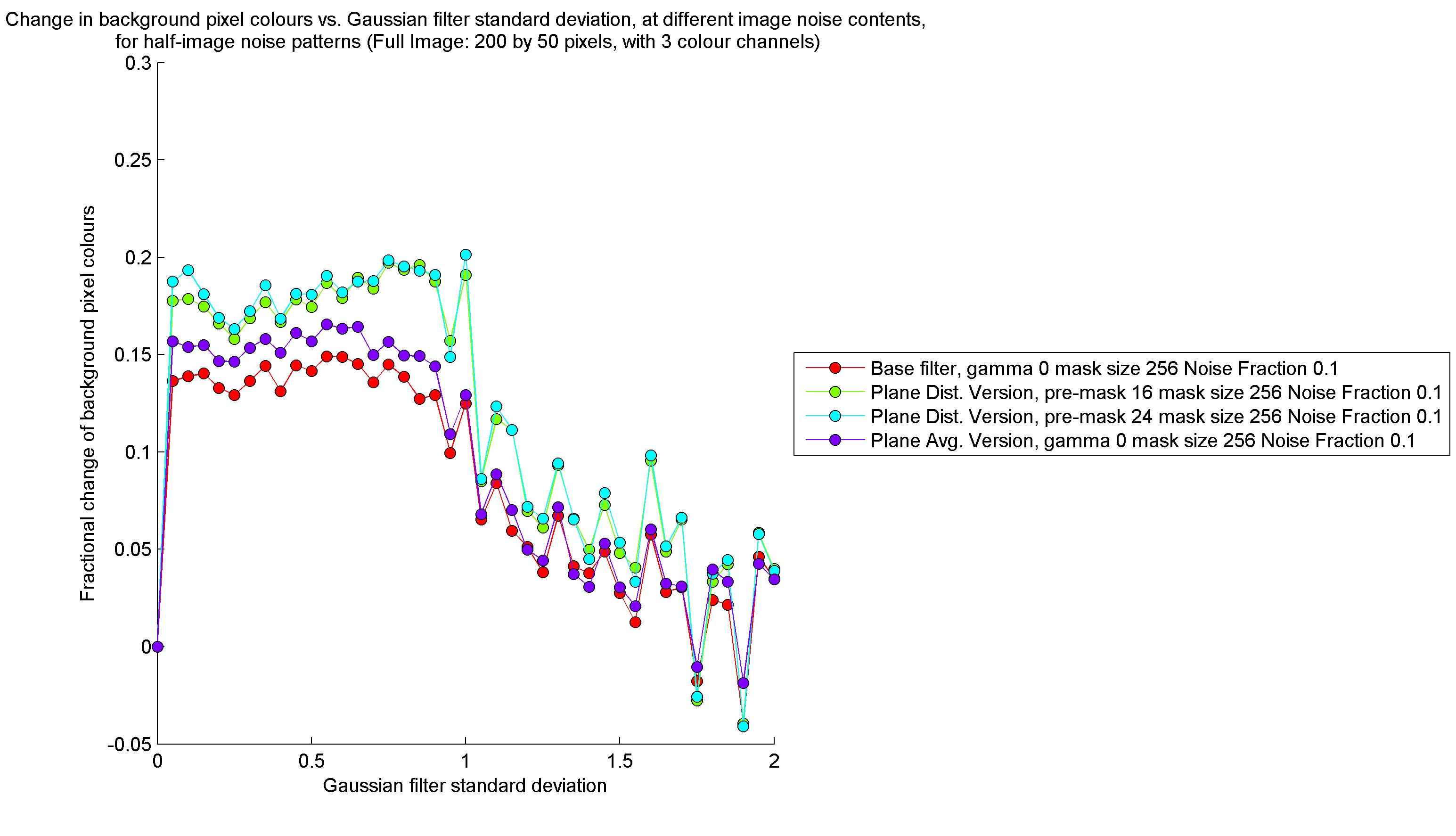
It appears that the plane-fitting filters are slightly more effective in removing noise than the two-pass filters which used counts of mask inclusions (described in the previous post), although they contaminate non-noise pixels by about the same amount.
As a final point of comparison, the montage of images below demonstrates that the plane-fitting filters are very effective in smoothing noise pixels near areas filled with the same colour. Out of the two plane-fitting filters, the one which uses planes to calculate pixel distances is the most effective at removing noise.
Comparison of Noise Pattern Unfiltered and Filtered Images (10 percent noise, Gaussian blurring function standard deviation of zero)
.png)